حسگری به اندازه یک برنج برای القای حس لامسه به رباتهای جراح
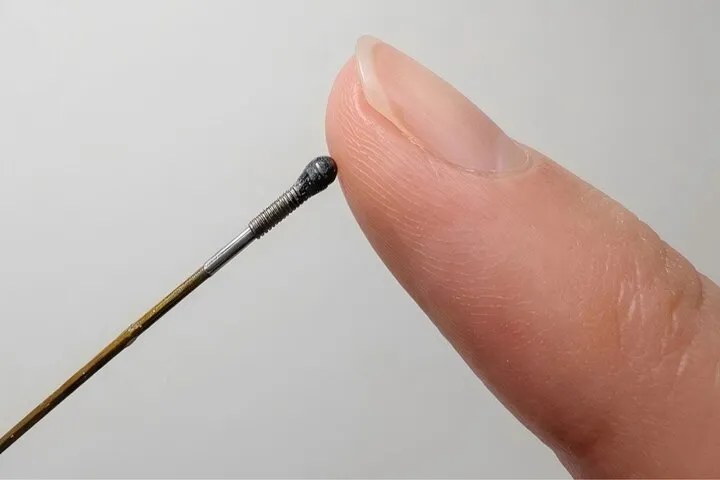 دانشمندان چینی حسگری به اندازه یک دانه برنج ساختهاند که به رباتهای جراح اجازه میدهد لامسه را در لحظه حس کنند. این حسگر میتواند ساختارهای پنهان تومورمانند را در زیر بافت نرم با استفاده از حسگر نوری و تجزیه و تحلیل مبتنی بر هوش مصنوعی تشخیص دهد.
دانشمندان چینی حسگری به اندازه یک دانه برنج ساختهاند که به رباتهای جراح اجازه میدهد لامسه را در لحظه حس کنند. این حسگر میتواند ساختارهای پنهان تومورمانند را در زیر بافت نرم با استفاده از حسگر نوری و تجزیه و تحلیل مبتنی بر هوش مصنوعی تشخیص دهد. 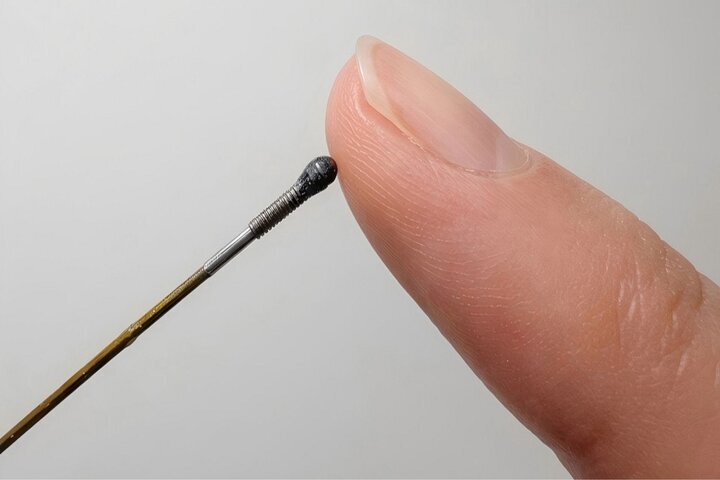
به گزارش راهبرد معاصر، محققان در چین یک حسگر نوری به اندازه یک دانه برنج را توسعه دادهاند که میتواند به رباتهای جراح و ابزارهای پزشکی حس لامسه بدهد. این دستگاه، نیرو، فشار و پیچش را در هر جهتی با استفاده از نور به جای الکترونیک اندازهگیری میکند.
این حسگر تنها ۱.۷ میلیمتر اندازه دارد و محققان میگویند که میتواند به رباتها کمک کند تا تماس ناامن را در طول مراحل ظریف تشخیص دهند و فوراً پاسخ دهند.
این تیم همچنین نشان داد که این دستگاه میتواند ساختارهای پنهان زیر مواد نرم، از جمله اشیاء تومورمانند تعبیه شده در مدلهای بافتی را شناسایی کند.
این حسگر توسط محققان دانشگاه شانگهای جیائو تونگ (Shanghai Jiao Tong) ابداع شده است.
نور جایگزین الکترونیک میشود
سیستمهای جراحی رباتیک فعلی به شدت به تصویربرداری متکی هستند. با این حال، آنها برای حس کردن تعامل فیزیکی در فضاهای جراحی تنگ تلاش میکنند. از طرفی، حسگرهای نیروی موجود نیز برای بسیاری از ابزارهای مینیاتوری بسیار بزرگ هستند.
جیانلونگ یانگ (Jianlong Yang)، سرپرست تیم تحقیقاتی از دانشگاه شانگهای جیائو تونگ گفت: اگرچه سیستمهای تصویربرداری مدرن میتوانند ساختارها را به وضوح نشان دهند، اما اطلاعاتی در مورد تعامل فیزیکی، مانند نیرو یا گشتاور ارائه نمیدهند و حسگرهای نیروی موجود اغلب برای قرار گرفتن در ابزارهای مینیاتوری بسیار حجیم یا پیچیده هستند.
وی افزود: فناوری ما با فراهم کردن امکان اندازهگیری نیروی تماس، فشار، برش و پیچش توسط ماشینها میتواند به رباتها این امکان را بدهد که تماس ناامن را به موقع تشخیص داده و اقدامات خود را در لحظه به ویژه در محیطهای کوچک و حساس تنظیم کنند.
محققان این حسگر را در اطراف یک فیبر نوری با نوک الاستومر نرم طراحی کردند. وقتی نوک این حسگر یک جسم را لمس میکند، کمی تغییر شکل میدهد. این حرکت کوچک، نحوه پخش نور داخل حسگر را تغییر میدهد. سپس یک دسته فیبر منسجم، الگوی نور را به یک دوربین منتقل میکنند. این سیستم، تصویرِ گرفته شده را با استفاده از روشهای مبتنی بر داده برای محاسبه نیرو و گشتاور در همه جهات تجزیه و تحلیل میکند.
محققان میگویند که این سیستم از پیچیدگی سیمکشی موجود در حسگرهای مینیاتوری معمولی جلوگیری میکند.
یانگ گفت: حسگر ما متفاوت از حسگرهای نیروی مینیاتوری مرسوم، مانند سیستمهای توری براگ فیبری (FBG) که به عناصر حسگر چندگانه و ساختارهای با دقت طراحیشده برای جداسازی اجزای مختلف نیرو متکی هستند، عمل میکند.
وی افزود: ما نیرو را به صورت قطعه قطعه اندازهگیری نمیکنیم، بلکه حالت تماس کلی را در یک مرحله حس میکنیم. ما معتقدیم که این تغییر میتواند ساخت ابزارهای فشردهای را که هم میتوانند ببینند و هم حس کنند، آسانتر کند.
تشخیص ساختارهای پنهان
این تیم دستگاه را تحت شرایط بارگذاری کنترلشده با استفاده از نیروهای شناختهشده و حرکات پیچشی آزمایش کرد. این حسگر اندازهگیریهای تکرارپذیر ارائه داد و خوانشها در طول چرخههای بارگذاری و تخلیه ثابت ماندند.
محققان همچنین دستگاه را در مدلهای ژلاتینی حاوی اشیاء کروی سفت که برای تقلید از تومورهای پنهان در زیر بافت طراحی شدهاند، آزمایش کردند و حسگر با موفقیت ساختارهای تعبیهشده را شناسایی و مکانیابی کرد.
این تیم معتقد است که این فناوری میتواند هدایت لمسی را در جراحیهای کمتهاجمی بهبود بخشد. جراحانی که از سیستمهای رباتیک استفاده میکنند اغلب از طریق مسیرهای باریکی کار میکنند که تماس تصادفی میتواند به بافتهای ظریف آسیب برساند.
یانگ گفت: سیستمهای رباتیک مورد استفاده در جراحیهای کمتهاجمی در فضاهای بسیار تنگ، مانند داخل چشم یا از طریق مسیرهای جراحی باریک عمل میکنند و این فناوری با ایمنتر و دقیقتر کردن این ابزارها و رباتها میتواند روشهای پزشکی ظریف را کنترلشدهتر کرده و خطر آسیب تصادفی را کاهش دهد.
مسیری به سوی استفاده در دنیای واقعی
محققان اکنون قصد دارند ثبات تولید را بهبود بخشیده و الزامات کالیبراسیون را قبل از استقرار تجاری کاهش دهند. آنها همچنین قصد دارند این حسگر را در سیستمهای رباتیک پزشکی و صنعتی برای آزمایش طولانیمدت تحت شرایط عملیاتی واقعی ادغام کنند.
این تیم اعلام کرد که کار اضافی بر روی بستهبندی این فناوری در سیستمهای فشردهای متمرکز خواهد شد که پزشکان و مهندسان بتوانند به راحتی در محیطهای عملی مستقر کنند.
این مطالعه در مجله Optica منتشر شده است./ ایسنا