این ربات خط بریل را سریعتر از انسان میخواند
 یک حسگر رباتیک که در «دانشگاه کمبریج» ساخته شده و مبتنی بر هوش مصنوعی است، پس از آموزش دیدن توانست خط بریل را دو برابر سریعتر از انسان بخواند.
یک حسگر رباتیک که در «دانشگاه کمبریج» ساخته شده و مبتنی بر هوش مصنوعی است، پس از آموزش دیدن توانست خط بریل را دو برابر سریعتر از انسان بخواند. 
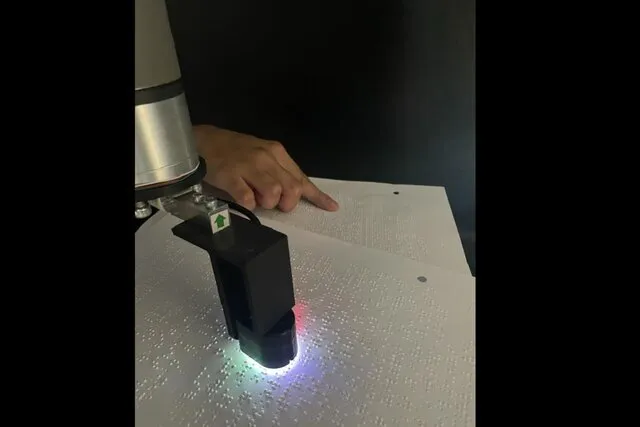
به گزارش راهبرد معاصر؛ گروهی از پژوهشگران انگلیسی یک حسگر رباتیک ساختهاند که از روشهای مبتنی بر هوش مصنوعی استفاده میکند تا خط بریل را تقریبا دو برابر سریعتر از بیشتر انسانها بخواند.
به نقل از ساینمگ، گروه پژوهشی «دانشگاه کمبریج» (University of Cambridge) از الگوریتمهای یادگیری ماشینی برای آموزش دادن حرکت سریع روی خطوط متن بریل به حسگر رباتیک استفاده کردند. این ربات توانست خط بریل را با سرعت ۳۱۵ کلمه در دقیقه و با دقت نزدیک به ۹۰ درصد بخواند.
اگرچه ربات بریلخوان به عنوان یک فناوری کمکی توسعه نیافته است، اما پژوهشگران میگویند حساسیت بالای مورد نیاز برای خواندن خط بریل، آن را به یک آزمایش ایدهآل در ساخت دستهای رباتیک یا پروتزهایی با حساسیت نوک انگشتان انسان تبدیل میکند.
نوک انگشتان انسان به طور قابل توجهی حساس هستند و به ما کمک میکنند تا اطلاعاتی را در مورد دنیای اطراف خود جمعآوری کنیم. نوک انگشتان ما میتوانند تغییرات کوچک را در بافت یک ماده تشخیص دهند یا به ما کمک کنند تا بدانیم هنگام برداشتن یک جسم باید چقدر نیرو استفاده کنیم. برای مثال، برداشتن تخم مرغ بدون شکستن آن یا برداشتن توپ بولینگ بدون انداختن آن.
بازتولید این سطح از حساسیت در یک دست رباتیک با صرفهجویی کردن در انرژی، یک چالش بزرگ در حوزه مهندسی است. پژوهشگران آزمایشگاه پروفسور «فومیا آیدا» (Fumiya Iida) در دپارتمان مهندسی دانشگاه کمبریج سعی دارند راهحلهایی را برای این مهارتها و مهارتهای دیگری ارائه دهند که برای انسان آسان، اما برای رباتها دشوار هستند.
«پارث پوتدار» (Parth Potdar) پژوهشگر ارشد این پروژه گفت: نرمی نوک انگشتان، یکی از دلایلی است که ما میتوانیم اشیا را با فشار مناسب در دست بگیریم. برای رباتها، نرمی یک ویژگی سودمند است، اما اطلاعات زیادی نیز باید از حسگر دریافت شوند و داشتن هر دو ویژگی به صورت همزمان، به ویژه هنگام برخورد داشتن با سطوح انعطافپذیر یا تغییرشکلپذیر دشوار خواهد بود.
خط بریل یک آزمون ایدهآل برای نوک انگشت ربات است، زیرا از آن جهت که نقطهها در هر الگوی حروف بسیار نزدیک به هم هستند، خواندن آن به حساسیت بالایی نیاز دارد. پژوهشگران از یک حسگر برای ساخت یک ربات بریلخوان استفاده کردند که خواندن انسان را با دقت بیشتری تقلید میکند.
«دیوید هاردمن» (David Hardman) از پژوهشگران این پروژه گفت: خوانندگان رباتیک خط بریل وجود دارند، اما آنها فقط یک حرف را در هر مرتبه میخوانند و خواندن آنها مانند انسانها نیست. بریلخوانهای رباتیک موجود به یک روش ثابت کار میکنند. آنها الگوی یک حرف را لمس میکنند، آن را میخوانند، از سطح فاصله میگیرند، دوباره حرکت میکنند و روی الگوی حرف بعدی پایین میآیند. ما چیزی میخواهیم که واقعبینانهتر و بسیار کارآمدتر باشد.
حسگر رباتیکی که پژوهشگران در این پروژه استفاده کردند، دارای یک دوربین در نوک انگشت است و با استفاده از ترکیبی از اطلاعات دوربین و حسگرها میخواند. پوتدار گفت: این یک مشکل دشوار برای متخصصان رباتیک است، زیرا پردازش تصویر زیادی باید انجام شود تا تاری حرکت را از بین ببرد و این به زمان و انرژی نیاز دارد.
این گروه پژوهشی، الگوریتمهای یادگیری ماشینی را توسعه دادند تا خواننده رباتیک بتواند پیش از تشخیص دادن حروف با حسگر، تصاویر را محو کند. آنها الگوریتم را روی مجموعهای از تصاویر واضح از خط بریل با تاری جعلی اعمالشده آموزش دادند. پس از این که الگوریتم یاد گرفت حروف را محو کند، پژوهشگران از یک مدل بینایی رایانهای برای شناسایی و طبقهبندی کردن هر حرف استفاده کردند.
هنگامی که الگوریتمها گنجانده شدند، پژوهشگران ربات خواننده خود را با اعمال آن روی ردیفهایی از خطوط بریل آزمایش کردند. بریلخوان رباتیک در هر دقیقه توانست ۳۱۵ کلمه را با دقت ۸۷ درصد بخواند که دو برابر سریعتر و دقیقتر از یک بریلخوان انسان است.
هاردمن گفت: با توجه به این که ما از الگوریتم تاری جعلی استفاده کردیم، تعجبآور بود که ربات چقدر در خواندن خط بریل دقیق عمل میکند. ما یک مبادله خوب را بین سرعت و دقت پیدا کردیم که در مورد خوانندگان انسانی نیز صدق میکند.
پوتدار گفت: سرعت خواندن خط بریل، یک روش عالی برای بررسی کردن پویایی عملکرد سیستمهای حسگر لمسی است. بنابراین، یافتههای ما میتوانند کاربردهایی را فراتر از خط بریل داشته باشند و برای کارهایی مانند تشخیص دادن بافتهای سطح یا لغزش ربات روی آنها اجرا شوند.
پژوهشگران امیدوارند که در آینده بتوانند این فناوری را در مقیاس یک دست یا پوست انسان بسازند. این پژوهش با پشتیبانی «برنامه توسعه پژوهش جهانی سامسونگ» (Samsung Global Research Outreach Program) انجام شد.
این پژوهش در مجله «IEEE Robotics and Automation Letters» به چاپ رسید. / ایسنا